
It’s been a very poor summer for astronomical observations around here this year. We’ve had very few truly clear skies until just the last couple of weeks. I’ve heard similar comments on some of the forums too. Fingers crossed it improves for us all now that the darker nights are here.
So during the year I’ve been concentrating upon improving the design of the Pilomar assembly. I’ve reworked the internal mechanism, and the electronics to iron out several limitations that became apparent in the first version. The most obvious limitations were :-
- The bearing mechanism was slightly rough, causing the motors to slip occasionally. This could cause position errors. It also had a limited range of movement (180degrees azimuth range, East-South-West)
- The Raspberry Pi was responsible for both taking the photographs and moving the motors. Linux isn’t ideal for realtime motor control, and sure enough it was proving difficult to take long exposures and keep the telescope moving smoothly.
- The precision of the original version was 66 positions per degree. This was on the limit of the resolution of a pixel, causing some blurring on even short exposures.
- It was quickly apparent that the deep-sky objects that I wanted to photograph were going to require longer exposures than I could reliably achieve.
So version 2 was born. I’ve reworked the bearings to allow more complete and smoother movement. The motor control is now performed by a separate microcontroller (Adafruit’s Feather RP2040). I didn’t want to include a microcontroller originally, it felt too complex, but it turned out to be the most direct way to overcome the Linux limitations. So I had a crash-course in microcontrollers and CircuitPython. In fact several crash courses! It took far longer than I hoped to get a working solution. The azimuth and altitude gearing has been reworked to provide 266 positions per degree, well within the tolerance of the camera to keep blurring to a minimum. The main Python program has also been extensively reworked to improve reliability and ease of use.
I can already think of things for Version 3! But this type of project never ends I guess.
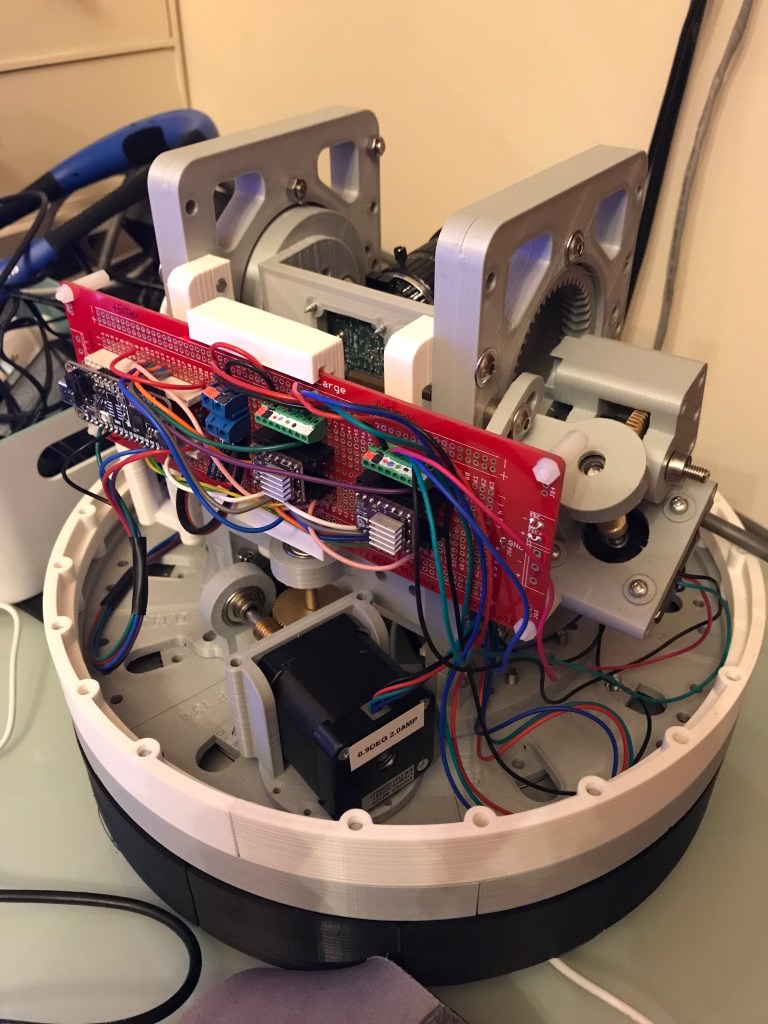
Pilomar V2 mechanism
Just this week while checking for an ISS pass I noticed that the sky was remarkably clear for the first time in many months, so rushed out the incomplete V2 to give it an initial real-life test.
The choice of observation target was a little limited, but I chose something challenging. The M27 Dumbbell Nebula. That’s a smaller and fainter target than the Orion Nebula that I captured in February. I had low hopes for any success on a first attempt. Just 11 images (20 seconds each) were captured before the clouds came in, and I have not yet properly focused the lens. But was delighted to see a tiny ‘hint’ of the nebula in the very first batch of images I captured. At this point the important fact is that it managed to track DURING long exposures and no star trails!

Very first image captured with V2
So I’m hoping for a few more clear nights so that I can fine tune things further. And also complete printing the DOME ! It’s naked at the moment.
Achieving ultra-crisp focus with the little RPi Hi Quality Camera 16mm lens is a real challenge. I’m currently investigating ‘Bahtinov Masks’ that are used to help focus larger telescopes. It’s proving fiddly to scale down to the size of a small lens, but experiments continue!

