I was amazed at the interest in the little telescope snippet that I posted on Twitter at the start of the year. That gave me some courage to proceed with the project and try to improve the design. The summer months here in North Yorkshire are quite light which is a nuisance for using the telescope, but more frustratingly the weather has been definitely anti-astronomy. We’ve had an unbelievable number of cloudy evenings. So for the last few months I’ve been re-engineering quite a lot of the telescope design to improve it’s capabilities for the autumn.
- Reduce friction
- Improve precision
- Extend exposure times
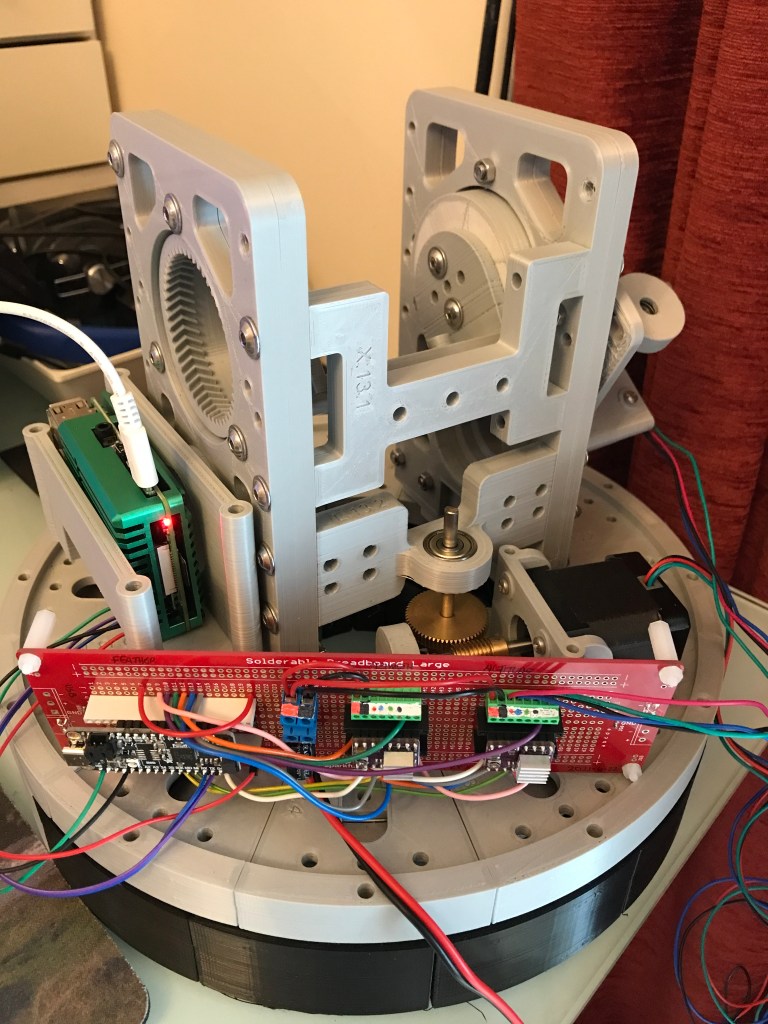
The key development has been to introduce a microcontroller to handle the motor control. The original version used a single RaspberryPi 4 to handle ALL tasks, various limitations with Linux and the general workload resulted in a limit of around 5 second exposures per image. I’ve now handed motor control over to a microcontroller so that the camera motion is continuous and the RPi4 is now free to concentrate more upon the photography. Microcontrollers are new to me, I started with the new Raspberry Pi Pico RP2040 and Micropython. I’ve ended up using its sister board the Adafruit Feather RP2040 and Circuitpython. (It’s a long story, but I’ve had more success with the Adafruit board)
I also redesigned the mechanism inside the telescope, using the same 0.9Degree Nema17 motors, but now linked to a more precise gearing solution giving 96000 positions per full circle on azimuth and altitude – hopefully precise enough to keep motion blur within limits – that’s around 0.004 degree control. Friction is nicely reduced after a lot of brainstorming and experiments around the bearings and some fun learning how to design and print herringbone gears, the new version feels really solid. It has been a journey to design 3D printed components to do that. I have all the basics back in place, there is time to take some rough-edges off here and there while waiting for the darker nights to return. I need to reduce the size of the motorcontroller board for sure!
I suspect that I will have to revisit the photography routines too, the software on the RPi4 is suffering from some bloat after many side experiments, so some pruning is needed there too. It will be refreshing to switch from ‘engineering’ to ‘software’ work at that point 🙂